

Automotive industry
InfiPoints
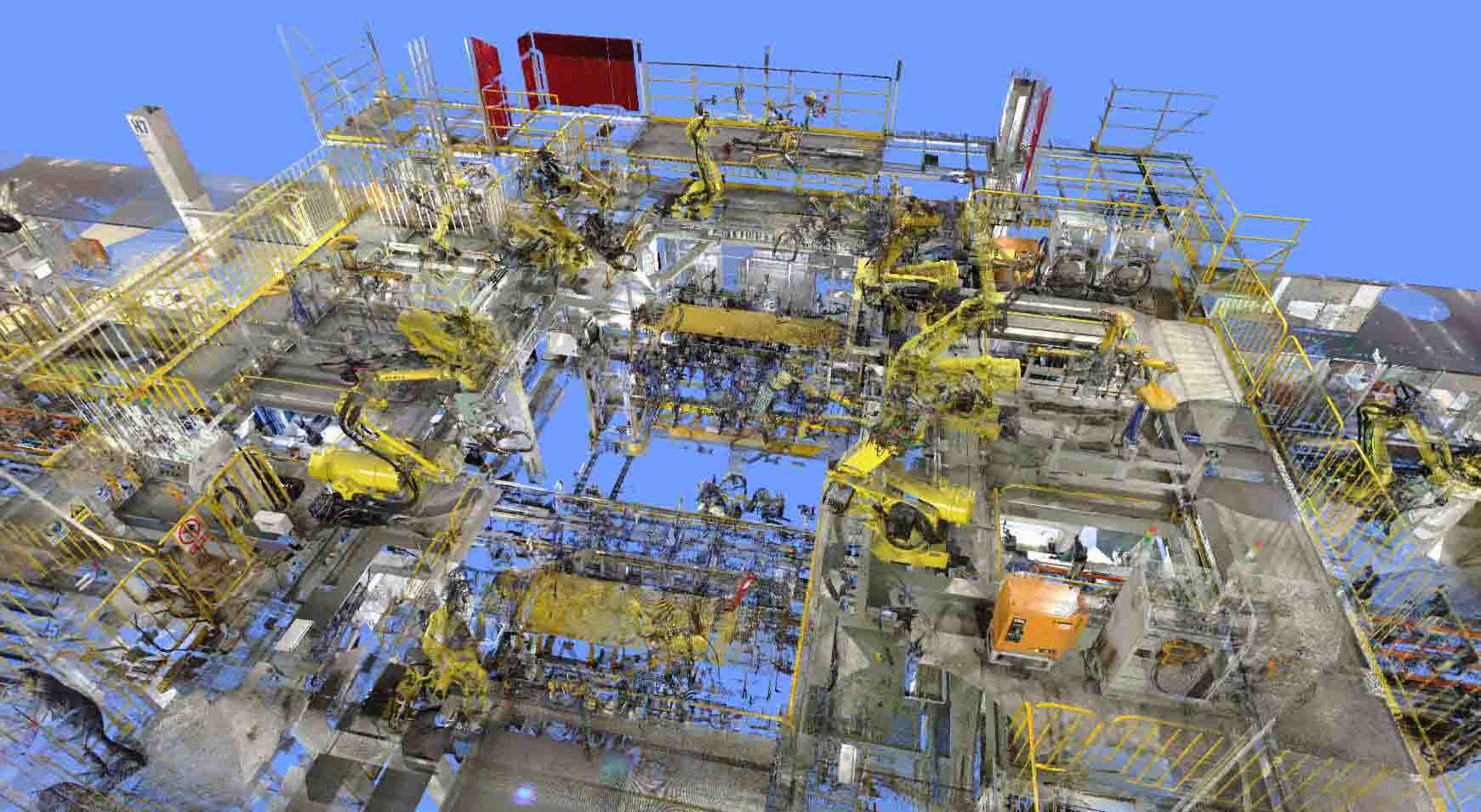
The customer wants to move the automobile production line of one base to another base, and conduct complete data collection of the body welding line before relocation by means of three-dimensional laser measurement, so as to realize the application purposes of digitization archive, dimension measurement and two-dimensional layout drawing before relocation.After relocation and debugging, the new workshop is scanned and recorded again to make a comparison of equipment layout differences before and after relocation. It can also be applied to virtual reality visualization, manufacturing simulation, logistics simulation, offline programming of automation equipment, scanning data cloud, manufacturing information implementation of Internet of things, etc.
Field measurement USES FARO Focus 350 device and data processing USES InfiPoints platform to conduct regional block processing for the whole welding line. High quality point cloud can be obtained by automatic denoising. The base model of the robot can be extracted automatically.
The customer wants to move the automobile production line of one base to another base, and conduct complete data collection of the body welding line before relocation by means of three-dimensional laser measurement, so as to realize the application purposes of digitization archive, dimension measurement and two-dimensional layout drawing before relocation.After relocation and debugging, the new workshop is scanned and recorded again to make a comparison of equipment layout differences before and after relocation. It can also be applied to virtual reality visualization, manufacturing simulation, logistics simulation, offline programming of automation equipment, scanning data cloud, manufacturing information implementation of Internet of things, etc.
Field measurement USES FARO Focus 350 device and data processing USES InfiPoints platform to conduct regional block processing for the whole welding line. High quality point cloud can be obtained by automatic denoising. The base model of the robot can be extracted automatically.
Related Cases
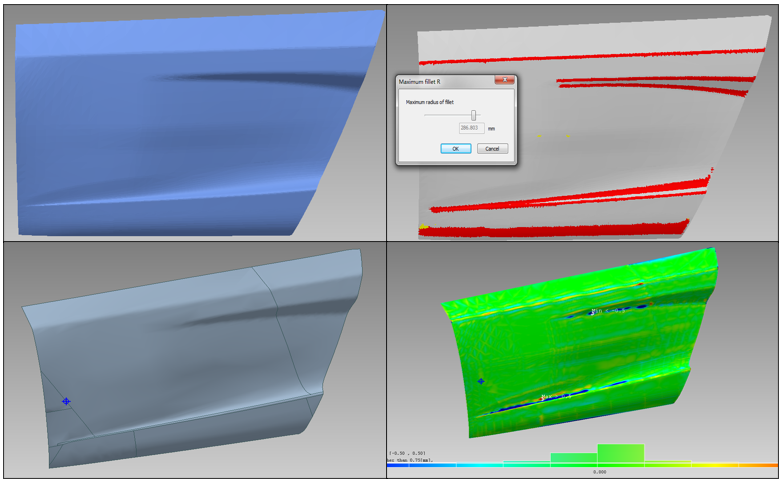
The competitive product analysis department of the customer scans the ..
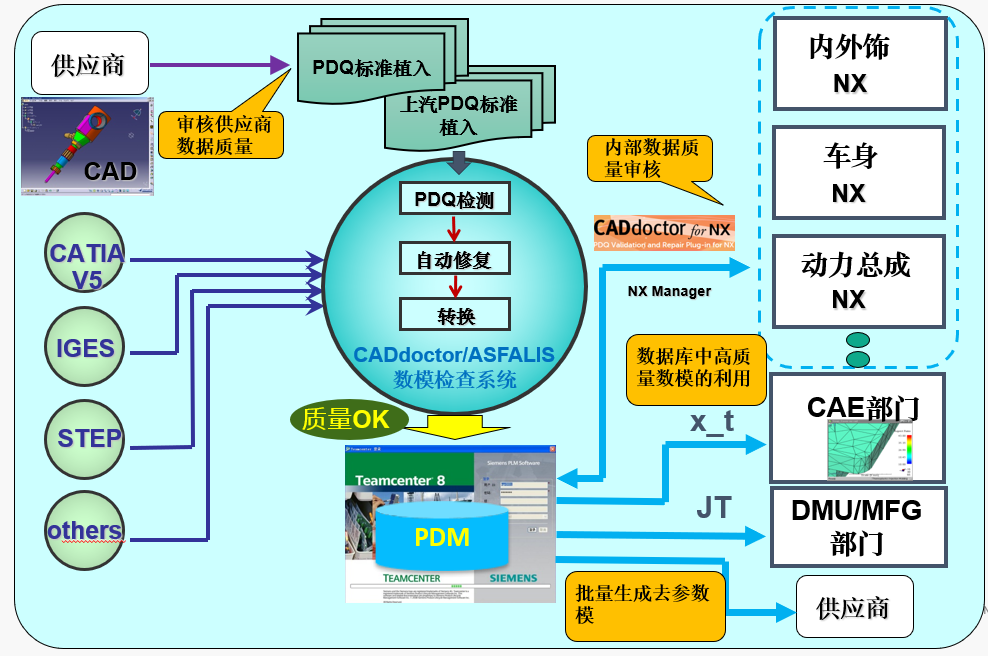
By using ASFALIS inspection system, a famous domestic OEM optimize..
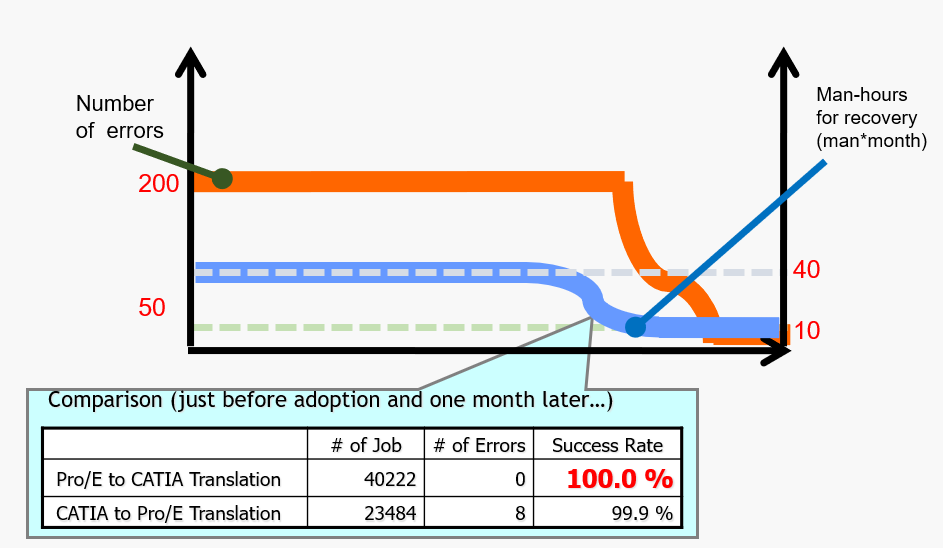
A world famouse OEM sets up control nodes for internally developed..